


周一至周五 09:00-18:00
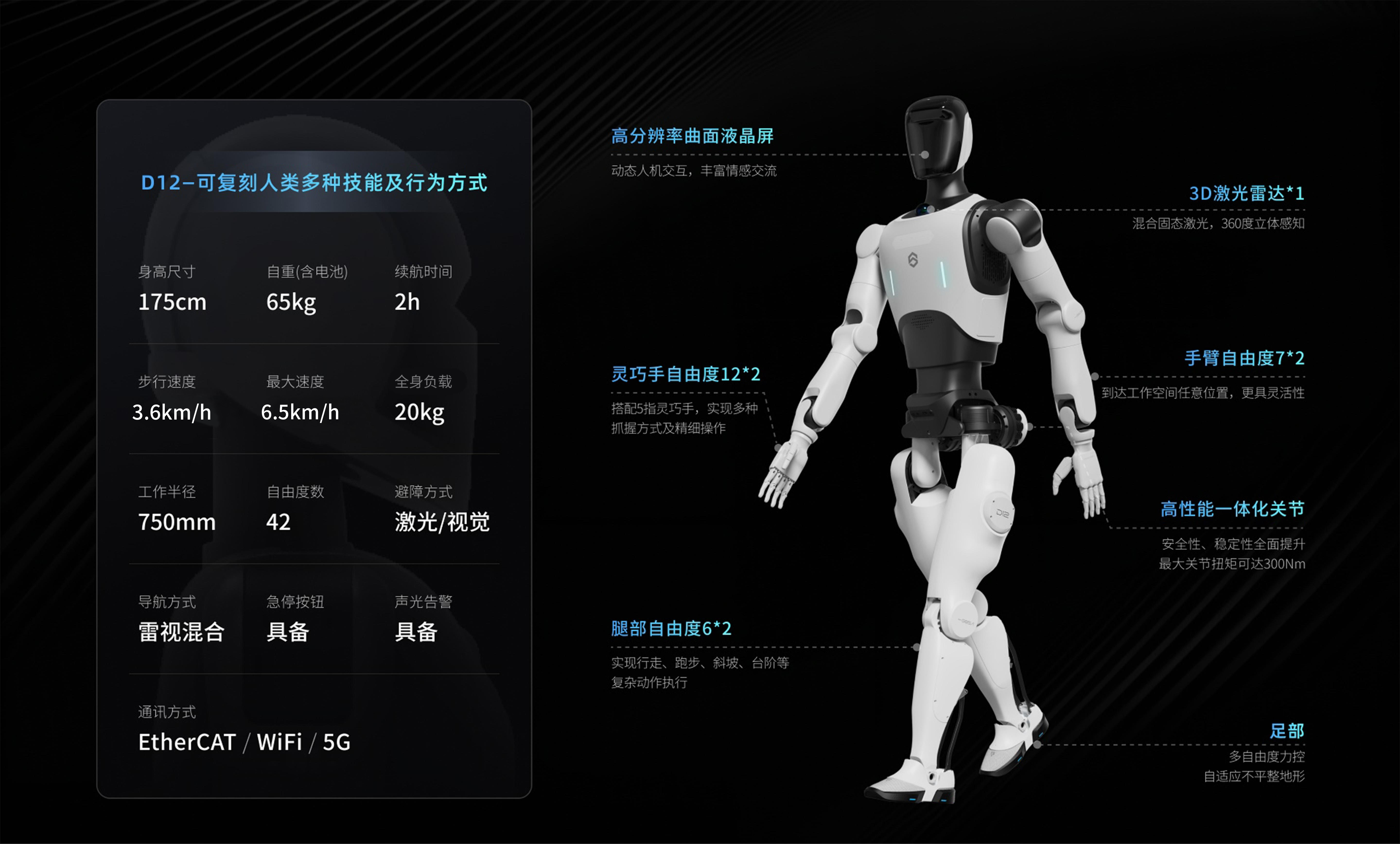
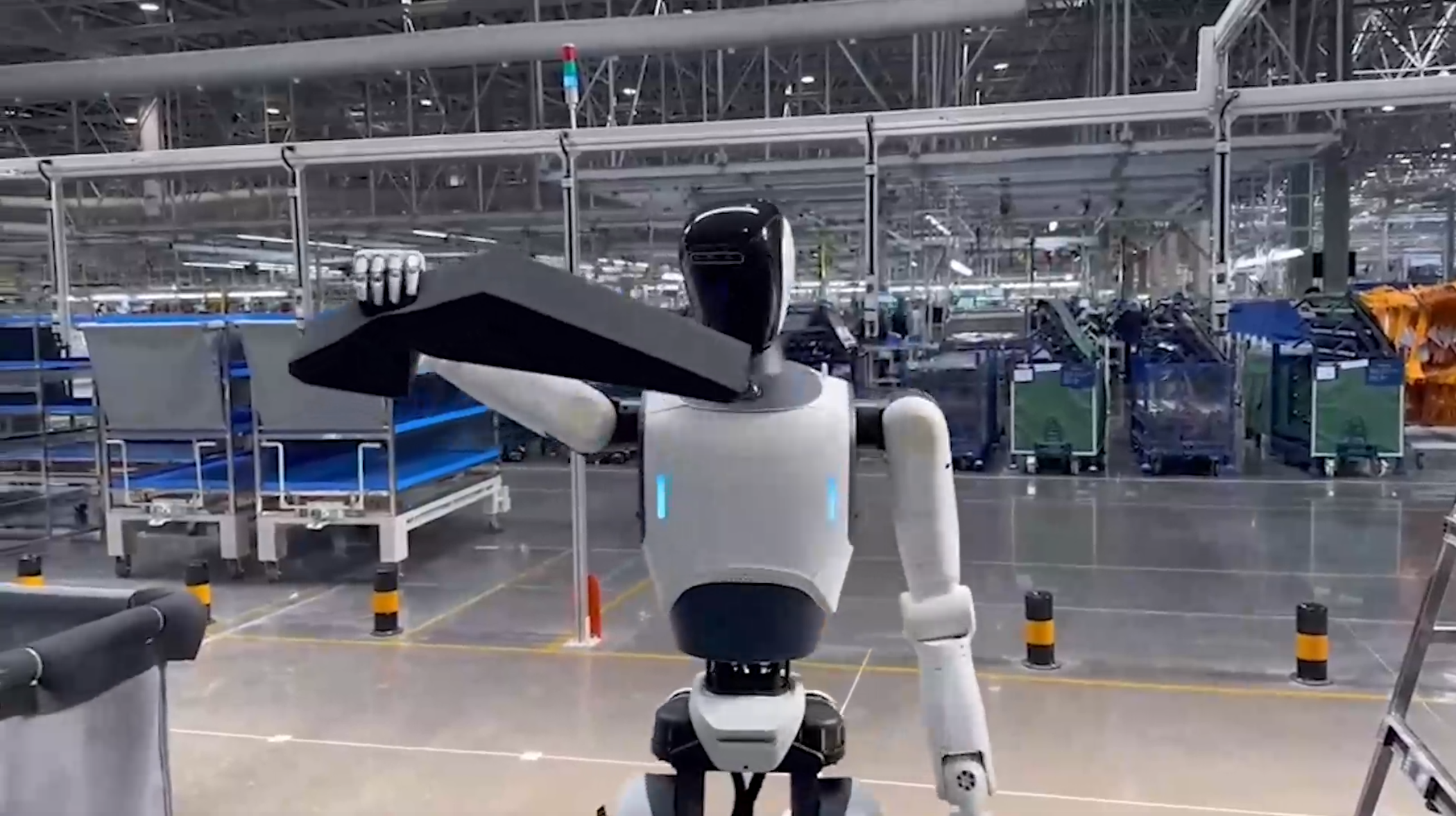
基于感控融合强化学习控制技术,可识别自身姿态与环境变化并规划行动,大幅提升全地形适应能力,保持超强平衡。
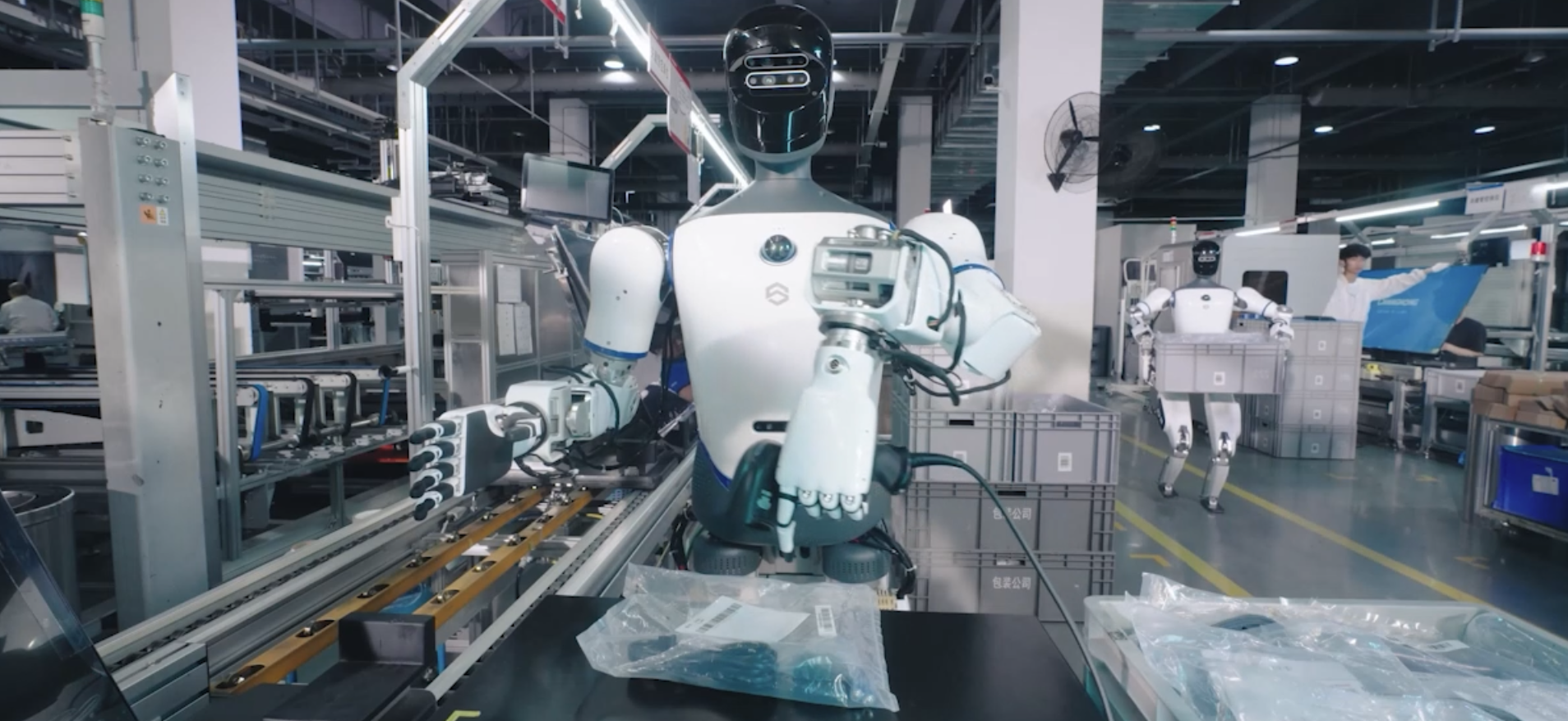
依托算法平台及海量数据训练,可快速开发人形机器人面向各类应用场景的任务执行能力。
基于多传感器融合的SLAM技术,初步形成人机共融环境下的安全“自驾”方案,在工厂、园区等环境实现自主建图与定位导航。
面向服务场景,实现多模态拟人交互,突破视觉语言大模型的人机交互与任务理解技术,配备丰富交互表情、20 + 拟人肢体动作及垂类知识语音问答。

公共安全

智慧安防
 五八智能
五八智能

周一至周五 09:00-18:00


 地址
地址
